
Quadrotor estão entre as primeiras aeronaves de pouso e decolagem verticais e se diferem dos helicópteros principalmente por possuir hélices de elevação fixa, que não variam o angulo de ataque [que é o que faz um helicóptero normal andar para a frente, diga-se de passagem]. Toda a movimentação de um quadrotor é conseguida alterando-se a velocidade relativa de cada um dos motores.
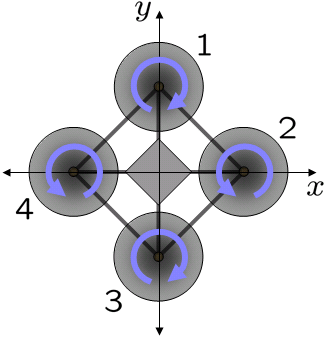
"Each rotor produces both a thrust and torque about its center of rotation, as well as a drag force opposite to the vehicle's direction of flight. If all rotors are spinning at the same angular velocity, with rotors one and three rotating clockwise and rotors two and four counterclockwise, the net aerodynamic torque, and hence the angular acceleration about the yaw axis is exactly zero, which implies that the yaw stabilizing rotor of conventional helicopters is not needed. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).
Angular accelerations about the pitch and roll axes can be caused separately without impacting the yaw axis. Each pair of blades rotating in the same direction controls one axis, either roll or pitch, and increasing thrust for one rotor while decreasing thrust for the other will maintain the torque balance needed for yaw stability and induce a net torque about the roll or pitch axes. This way, fixed rotor blades can be made to maneuver the quad rotor vehicle in all dimensions. Translational acceleration is achieved by maintaining a non-zero pitch or roll angle."


Nenhum comentário:
Postar um comentário